voestalpine bohler welding BOX BASIC RI 3000 EtherCAT Manual de usuario

INSTRUCTION MANUAL
Lasting Connections
BOX BASIC RI 3000 EtherCAT
BOX PLUS RI 3000 EtherCAT
IN
ST
RU
CT
IO
N
MA
NU
AL
L
ast
i
n
g
C
onnect
i
ons
B
O
X BA
S
I
C
RI
3
0
0
0
Eth
e
r
C
A
T
B
O
X PLU
S
RI 3
000
Et
h
er
CA
T
voestalpine Böhler Welding
www.voestalpine.com/welding

Cod. 91.08.307
Data 17/02/2021
Rev. A
ITALIANO ................................................................................................................................................................................3
ENGLISH................................................................................................................................................................................41
DEUTSCH..............................................................................................................................................................................79
FRANÇAIS............................................................................................................................................................................117
ESPAÑOL .............................................................................................................................................................................155
6 Targa dati, Rating plate, Leistungschilder, Plaque données, Placa de características ..................................................193
7 Significato targa dati, Meaning of rating plate, Bedeutung der Angaben auf dem Leistungsschild,
Signification de la plaque des données, Significado de la etiqueta de los datos.........................................................194
8 Schema, Diagram, Schaltplan, Schéma, Esquema ........................................................................................................195
9 Connettori, Connectors, Verbinder, Connecteurs, Conectores.....................................................................................197
10 Cavo I/O, I/O Cable, I/O-Kabel, Câble I/O, Cable I/O..................................................................................................198
11 Cavo Cleaning Station, Cleaning Station cable, Kabel Brenner-Reinigungseinheit , Câble station de nettoyage torche,
Cable unidad limpieza antorcha ...................................................................................................................................199
12 Cavo RJ45M-FREE, RJ45M-FREE Cable, Kabel RJ45M-FREE, Câble RJ45M-FREE, Cable RJ45M-FREE..........................200
13 Cavo RJ45M-RJ45M, RJ45M-RJ45M Cable, Kabel RJ45M-RJ45M, Câble RJ45M-RJ45M, Cable RJ45M-RJ45M...........201
14 Connessione LAN BOX XP, LAN BOX XP connection, Schaltung LAN BOX XP, Connexion LAN BOX XP,
Conexiòn LAN BOX XP ..................................................................................................................................................202
15 Connessione WIRE END, WIRE END connection, Schaltung WIRE END, Connexion WIRE END,
Conexiòn WIRE END .....................................................................................................................................................203
16 Lista ricambi, Spare parts list, Ersatzteilverzeichnis, Liste de pièces détachées, Lista de repuestos...........................204

ITALIANO
DICHIARAZIONE DI CONFORMITA’ CE
La ditta
voestalpine Böhler Welding Selco S.r.l. - Via Palladio, 19 - 35019 Onara di Tombolo (PD) - Italy
T. +39/0499413/111 - F. +39/0499413/311 - www.voestalpine.com/welding
dichiara che l'apparecchio tipo BOX BASIC RI 3000 EtherCAT 71.02.068
BOX PLUS RI 3000 EtherCAT 71.02.086
è conforme alle direttive EU: 2014/35/EU LOW VOLTAGE DIRECTIVE
2014/30/EU EMC DIRECTIVE
2011/65/EU RoHS DIRECTIVE
e che sono state applicate le norme: EN IEC 60974-1/A1:2019
EN 60974-10/A1:2015 Class A
Ogni intervento o modifica non autorizzati dalla voestalpine Böhler Welding Selco S.r.l. faranno decadere la validità di questa dichia-
razione.
Onara di Tombolo, 17/02/2021 voestalpine Böhler Welding Selco S.r.l.
Lino Frasson
3

4
SIMBOLOGIA
Pericoli imminenti che causano gravi lesioni e comportamenti rischiosi che potrebbero causare gravi lesioni.
Comportamenti che potrebbero causare lesioni non gravi o danni alle cose.
Le note precedute da questo simbolo sono di carattere tecnico e facilitano le operazioni.
INDICE
1 AVVERTENZE .................................................................................................................................................5
2 PRESENTAZIONE DELL'IMPIANTO.................................................................................................................5
2.1 EtherCAT ...............................................................................................................................................5
3 INSTALLAZIONE ............................................................................................................................................7
3.1 Configurazione "Weld@Net"..................................................................................................................7
4 CONNESSIONE CABLAGGI ...........................................................................................................................8
4.1 Comunicazione con generatore via CAN BUS (1*).................................................................................8
4.2 I/O BOX PLUS RI 3000 (2*)...................................................................................................................8
4.3 Power supply + I/O BOX RI 3000 (3*) ..................................................................................................9
4.3.1 Alimentazione...................................................................................................................................10
4.3.2 Ingressi digitali (DI1-DI2) ..................................................................................................................10
4.3.3 Uscite digitali (DO1-DO3-DO4) .......................................................................................................10
4.4 Cleaning station (BOX PLUS RI 3000) (4*) ...........................................................................................11
4.4.1 Alimentazione...................................................................................................................................12
4.4.2 Uscite digitali comando elettrovalvole (ELV) ......................................................................................12
4.4.3 Ingressi digitali da cleaning station ...................................................................................................12
4.5 BUS IN (EtherCAT) (5*)........................................................................................................................13
4.5.1 Ingressi digitali ..................................................................................................................................14
4.5.2 Ingressi digitali programmabili DI1...DI8 ...........................................................................................16
4.5.3 Ingressi digitali di processo................................................................................................................17
4.5.4 Ingressi analogici (CAN_BUS)............................................................................................................25
4.5.5 Uscite digitali ...................................................................................................................................25
4.5.6 Uscite digitali programmabili DO1...DO8.........................................................................................26
4.5.7 Uscite analogiche (AO1 ... AO9).......................................................................................................26
4.6 RIEPILOGO COMUNICAZIONI...........................................................................................................27
4.6.1 Dati da impianto di saldatura a robot ...............................................................................................27
4.6.2 Dati da robot a impianto di saldatura ...............................................................................................29
4.7 BUS OUT (EtherCAT) (6*)....................................................................................................................31
4.8 Lan - RI XP (Optional) (7*)...................................................................................................................32
4.9 Wire end (Optional) (8*)......................................................................................................................32
4.10 Configurazione ingressi digitali...........................................................................................................32
4.10.1 Configurazione ingressi digitali standard..........................................................................................32
4.10.2 Configurazione ingressi digitali invertiti ...........................................................................................32
5 ACCESSORI ................................................................................................................................................33
5.1 RI XP 71.02.020 ..................................................................................................................................33
5.1.1 Messa in servizio...............................................................................................................................33
5.1.2 Configurazione per PC locale............................................................................................................34
5.1.3 Configurazione per rete aziendale ....................................................................................................34
5.1.4 Configurazione PC (configurazione per PC locale) ............................................................................35
Configurazione INDIRIZZO IP e SUBNET MASK...............................................................................35
5.1.5 Configurazione dell'interfaccia ..........................................................................................................36
5.1.6 Led di segnalazione ..........................................................................................................................38
5.2 Wire end 73.50.080 / 73.50.081.........................................................................................................38

5
1 AVVERTENZE
Prima di iniziare qualsiasi operazione siate sicuri di aver ben letto e compreso questo manuale.
Non apportate modifiche e non eseguite manutenzioni non descritte.
L'impianto elettrico deve essere realizzato da personale tecnico in possesso di requisiti tecnico-professionali spe-
cifici e in conformità alle leggi dello stato in cui si effettua l'installazione.
Togliere l'alimentazione all'impianto prima di ogni intervento!
2 PRESENTAZIONE DELL'IMPIANTO
2.1 EtherCAT
N° DESCRIZIONE
1 Connettore EtherCAT (IN)
2 Connettore EtherCAT (OUT)
3 Led di segnalazione

6
1/2 CONNETTORE EtherCAT (IN/OUT)
Pin Segnale
1 TX+
2 TX-
3 RX+
4 Non utilizzato
5 Non utilizzato
6 RX-
7 Non utilizzato
8 Non utilizzato
3 LED DI SEGNALAZIONE
A LINK (ACTIVITY) - IN
OFF Collegamento non rilevato
VERDE Collegamento rilevato
VERDE intermittente In trasmissione/ricezione pacchetti ethernet
B STATO DEL MODULO
OFF Dispositivo in avvio
VERDE intermittente Dispositivo in stato pre-operativo
VERDE 1 accensione Dispositivo in stato di sicurezza
VERDE On-line
C STATO DI RETE
OFF On-line
ROSSO intermittente Allarme generale
ROSSO 1 accensione Allarme di stato
ROSSO 2 accensioni Allarme di sincronizzazione
ROSSO Timeout watchdog
D LINK (ACTIVITY) - OUT
OFF Collegamento non rilevato
VERDE Collegamento rilevato
VERDE intermittente In trasmissione/ricezione pacchetti ethernet
Consultare il sito: http://www.anybus.com/support/support.asp?PID=348&ProductType=Anybus-S
Documento: ABS EtherCAT Appendix, for version 2.xx

7
3 INSTALLAZIONE
L'interfaccia robot BOX RI 3000 è un dispositivo che permette la comunicazione tra un generatore e un’impianto automatizzato o
robotizzato.
Il dispositivo è in grado di comunicare attraverso segnali di tipo digitale, sia in trasmissione che in ricezione. Il trasferimento delle
informazioni al generatore di saldatura avviene attraverso l'apposito cavo di collegamento con protocollo can bus.
Convenzionalmente, in questo manuale, i segnali che entrano nell'interfaccia robot saranno chiamati "INGRESSI" mentre i segnali
che escono dall'interfaccia robot saranno chiamati "USCITE".
3.1 Configurazione "Weld@Net"
INGRESSI
DIGITALI
USCITE
DIGITALI

8
4 CONNESSIONE CABLAGGI
1* Comunicazione con generatore via CAN BUS
2* I/O BOX PLUS RI 3000
3* Power supply + I/O BOX RI 3000
4* Cleaning station (BOX PLUS RI 3000)
5* BUS IN (EtherCAT)
6* BUS OUT (EtherCAT)
7* Lan - RI XP (Optional)
8* Wire end (Optional)
4.1 Comunicazione con generatore via CAN BUS (1*)
Collegare il cavo di segnale CAN-BUS (1) per la gestione di dispositivi esterni (quali RI)
all'apposito connettore (9).
Inserire il connettore e ruotare la ghiera in senso orario fino al completo fissaggio delle
parti.
1 Tensione continua a +15V
2 Contatto di massa
3 Non utilizzato
4 Non utilizzato
5 Non utilizzato
6 Segnale CAN-H
7 Segnale CAN-L
4.2 I/O BOX PLUS RI 3000 (2*) Collegare il cavo di segnale CAN-BUS (2) per la gestione di dispositivi esterni (quali RI)
all'apposito connettore (10).
Inserire il connettore e ruotare la ghiera in senso orario fino al completo fissaggio delle
parti.
Collegare il cavo di segnale per la gestione di dispositivi esterni all'apposito connettore.
Segnale
A +24V IN
B GND
C +24V OUT
D GND
E Uscita digitale DO 5 (x ELV 1)
F Uscita digitale DO 6 (x ELV 2)
G Uscita digitale DO 7 (x ELV 3)
H Uscita digitale DO 8 (x ELV 4)
J Uscita digitale DO 2 (x ELV 5)
K COM
L Non utilizzato
M ELV 1
N ELV 2
P ELV 3
R ELV 4
S ELV 5
T Non utilizzato
U PE
V Non utilizzato
9
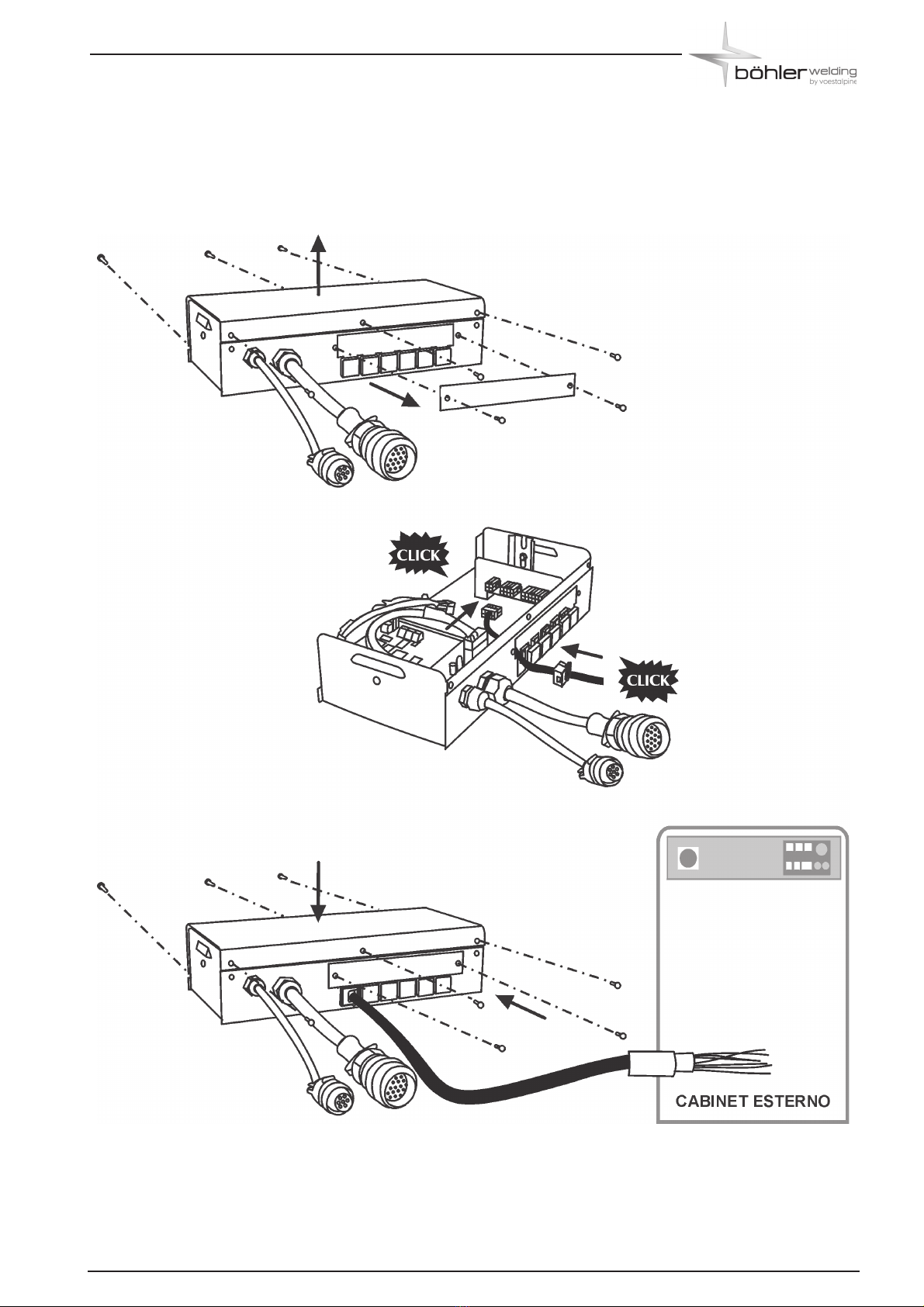
4.3 Power supply + I/O BOX RI 3000 (3*)

10
4.3.1 Alimentazione
J9-1 Filo 1 Collegare ad una tensione continua di +24V (IN)
J9-8 Filo Giallo/Verde Collegare al contatto di terra (PE)
J9-2 Filo 2 Collegare al contatto di massa
4.3.2 Ingressi digitali (DI1-DI2)
J9-6 Filo 6 MANUTENZIONE (DI1): segnale di comando per la messa in sicurezza
0 = 0V dell'impianto durante le fasi di manutenzione.
1 = 24V 0 = Impianto in normale funzionamento
1 = Protezione per manutenzione attiva
J9-7 Filo 7 EMERGENZA (DI2): segnale di comando per il blocco totale del processo
0 = 24V di saldatura. Da collegare ai dispositivi di sicurezza dell'impianto.
1 = 0V 0 = Impianto in allarme
1 = Impianto in normale funzionamento
I parametri gestiti da questi ingressi digitali possono essere scelti e program-
mati da FP-RC.
Default: non programmato.
Consultare la sezione "Set-up parametro 400" (Manuale di riparazione
Genesis...)
4.3.3 Uscite digitali (DO1-DO3-DO4)
J9-3 Filo 3 Uscita digitale programmabile DO1
J9-4 Filo 4 Uscita digitale programmabile DO3
J9-5 Filo 5 Uscita digitale programmabile DO4
I parametri gestiti da queste uscite digitali possono essere scelti e program-
mati da FP-RC.
Default: non programmato.
Consultare la sezione "Set-up parametro 400" (Manuale di riparazione
Genesis...)
Este manual sirve para los siguientes modelos
1
Tabla de contenidos
Idiomas:
Manuales populares de Instrumento de medición de otras marcas













Endress+Hauser
Endress+Hauser Proline Promag 50 Especificaciones técnicas

Siemens
Siemens SITRANS F Coriolis FCT030 Manual de lista de piezas

KLINGER
KLINGER CMF V Series Manual de usuario

EXFO
EXFO FTB-2 Manual de operación y mantenimiento

Keysight
Keysight M8290A Manual de usuario

ADTEK
ADTEK MW-5 Manual de usuario