Schmalz RECB Manual de usuario

Pneumatic Vacuum Generator RECB
Quick Start Guide
WWW.SCHMALZ.COM DE · 30.30.01.02635 · 00 · 12/20
DE Quick Start Guide Pneumatischer Vakuum-Erzeuger RECB....................................................................................................... 2
EN Quick Start Guide Pneumatic Vacuum Generator RECB.............................................................................................................. 15

1 Hinweise Quick Start Guide
Der Quick Start Guide wurde in deutscher Sprache erstellt. Er beschreibt wichtige Hin-
weise beim ersten Kontakt und zur Installation des Produkts und richtet sich dabei an
erfahrene Nutzer im Bereich der Automatisierungstechnik.
Detailliere Informationen finden Sie in den Dokumentationen unter www.schmalz.com
oder über den QR-Code.
Diese Information erhebt keinen Anspruch auf Vollständigkeit.
Technische Änderungen, Druckfehler und Irrtümer vorbehalten.
2 Lieferumfang
9
456
3
2
1
7
8
1 Positionierstift 2 Schrauben M6x10 4x
3 UR-Adapterflansch 4 Pneumatikschlauch 6/4
5 Vakuum-Erzeuger RECB 6 Anschlusskabel
7 Balgsauggreifer (rund), SPB1 40 ED-65 G1/4-
AG
8 USB-Stick
9 Set Saugeranschluss (Anschluss-Scheibe, O-
Ring, Schraube 4x)
— Quick Start Guide
3 Lieferung prüfen
1. Die gesamte Sendung anhand beiliegender Lieferpapiere auf Vollständigkeit prüfen.
2. Mögliche Schäden durch mangelhafte Verpackung oder durch den Transport sofort dem Spediteur und
J.SchmalzGmbH melden.
2 / 27 DE · 30.30.01.02635 · 00 · 12/20

4 RECB an die Druckluft und den elektrischen Anschluss anschließen
Um den RECB an die Druckluftversorgung anzuschließen und den elektrischen Anschluss herzustellen, wird der
RECB geöffnet.
üInnensechskant-Schlüssel der Größen SW 3 und 6 liegen bereit.
üNiedrigfeste Schraubensicherung (z.B. Loctite 221) liegt bereit.
üAnschlusskabel mit Winkel Buchse M12 5-polig bereitstellen (nicht im Lieferumfang enthalten).
1. Drei Schrauben der Größe M4x16mm an der
Unterseite lösen und entfernen.
2. Den RECB drehen und die obere Gehäuseschale
abnehmen.
3. Um den Kompaktejektor anheben zu können, die
Schraube M4 lösen und entfernen.
4. Den vormontierten Druckluftschlauch durch das
Gehäuse ziehen, sodass der Kompaktejektor leicht
angehoben werden kann. Dies erleichtert die
Montage vom Anschlusskabel und vom Druckluft-
schlauch.
DE · 30.30.01.02635 · 00 · 12/20 3 / 27

5. Das Anschlusskabel am Kompaktejektor befes-
tigen, maximales Anzugsmoment = handfest.
6. Den Sitz der Schläuche in den Steckverbindungen
(Vakuum und Druckluft) auf vollständige Ein-
führung prüfen.
7. Den Kompaktejektor auf die untere Gehäuseschale
auflegen. Dabei den Spannstift (1) in die Bohrung
am Kompaktejektor fügen.
1
ðAuf die Ausrichtung des Kompaktejektors zur
vorderen Gehäuseöffnung achten. Dies
erleichtert das Auflegen und Positionieren des
Kompaktejektors. Die Schläuche können den
Kompaktejektor leicht wegdrücken und leisten
beim Einlegen/Positionieren einen geringen
Widerstand.
8. Das Anschlusskabel in die Kabelauslassöffnung der
unteren Gehäuseschale legen.
4 / 27 DE · 30.30.01.02635 · 00 · 12/20

9. Die Schraube mit niedrigfester Schraubensicherung
benetzen und den Kompaktejektor befestigen.
Werkzeug ISK-Schlüssel SW 6 mm, Anzugsmoment
2 Nm.
10. Die obere Gehäuseschale auflegen. Dabei den an
der oberen Gehäuseschale angegossenen Nocken
in die Befestigungsbohrung am Kompaktejektor
fügen.
ðDie obere Gehäuseschale liegt bündig auf der
unteren auf und das Anschlusskabel liegt frei in
der Kabeldurchführung.
11. Den RECB so greifen, dass die obere und untere
Gehäuseschale zusammengehalten werden und
den RECB umdrehen.
12. Den RECB mit drei Schrauben verschließen, dabei
ist auf die Befestigungsschrauben eine niedrigfeste
Schraubensicherung aufzutragen. Die Schrauben
mit einem Drehmomentschlüssel der SW=3mm
mit einem Anzugsmoment von 1Nm festziehen.
DE · 30.30.01.02635 · 00 · 12/20 5 / 27

5 Mechanische Befestigung
VORSICHT
Verfangen im Anschlusskabel bzw. dem Druckluftschlauch insbesondere bei Bewegung des
kollaborativen Roboters.
Verletzung durch verfangene Gliedmaße oder Haare
4Das Anschlusskabel und den Druckluftschlauch konturnah und möglichst eng am Roboterarm
verlegen.
4Gefahrenbereich meiden.
Die Einbaulage des RECB ist beliebig.
Roboter-Flansch
Flansch-Adapterplatte
RECB
Die RECB wird unter Verwendung einer austauschbaren Flansch-Adapterplatte an einem kollaborativen Roboter
adaptiert. Dabei sind die Markierungen am Flansch und am Gehäuse der RECB zu beachten, diese bestimmen die
Ausrichtung der Anzeige und des Sauggreifers am Roboter.
üDie Flansch-Adapterplatte (nicht im Lieferumfang enthalten) ist am Roboter befestigt.
1. Der RECB wird auf die Flansch-Adapterplatte (nicht
im Lieferumfang enthalten) geschoben, dabei die
Poka Yoke-Markierungen beachten.
Flansch-Adapterplatte
2. Den RECB mit drei Gewindestiften (M5x16) radial
befestigen. Die Schrauben mit einem Drehmo-
mentschlüssel festziehen: Anzugsmoment 0,6Nm.
3x Gewindestift
M5x16
6 / 27 DE · 30.30.01.02635 · 00 · 12/20

6 Software installieren
Software Status: Polyscope (UR-Robot Software) muss den folgenden Softwarestand haben: e-Serie: 5.8 oder
höher.
Aktualisieren Sie ggf. die Robotersoftware unter: https://www.universal-robots.com/download/
Der Greifer ist nicht kompatibel zu Universal Robots CB-Reihe
(Polyscope 3.x).
Das URCap verwendet den Daemon-Port Ausgang 39991
Ergänzende Informationen zum Greifer unter SCPSi:
https://pimmedia.schmalz.com/Dokumente/Bedienungsanleitung_kurz/10/1002/100202/10020204369/
BAK_10.02.02.04369_de-DE_00.pdf
e-Serie
(1) Den Menüreiter "Menu > Settings > System > URCaps" drücken
1
Den USB-Stick bei eingeschaltetem System in das Programmierhandgerät stecken
(2) Wählen Sie "+", um das neue URCap zu installieren
Auf dem USB-Stick > URCap > "Schmalz Gripper” zur Installation auswählen und mit „Open“ bestätigen
(3) "Restart" drücken und auf den Neustart des Systems warten
(4) Nach Wiederstart ist die URCap "Schmalz-Gripper" aktiviert
DE · 30.30.01.02635 · 00 · 12/20 7 / 27

2
4
3
7 Konfiguration
Bevor Sie beginnen können, muss das URCap konfiguriert werden.
Greifer am Roboter montieren und das Ventil-Robset anschließen(> siehe Kap. Montage)
(1) Der Roboter muss voll betriebsbereit sein, um den Greifer benutzen zu können (Roboter Status leuchtet
grün)
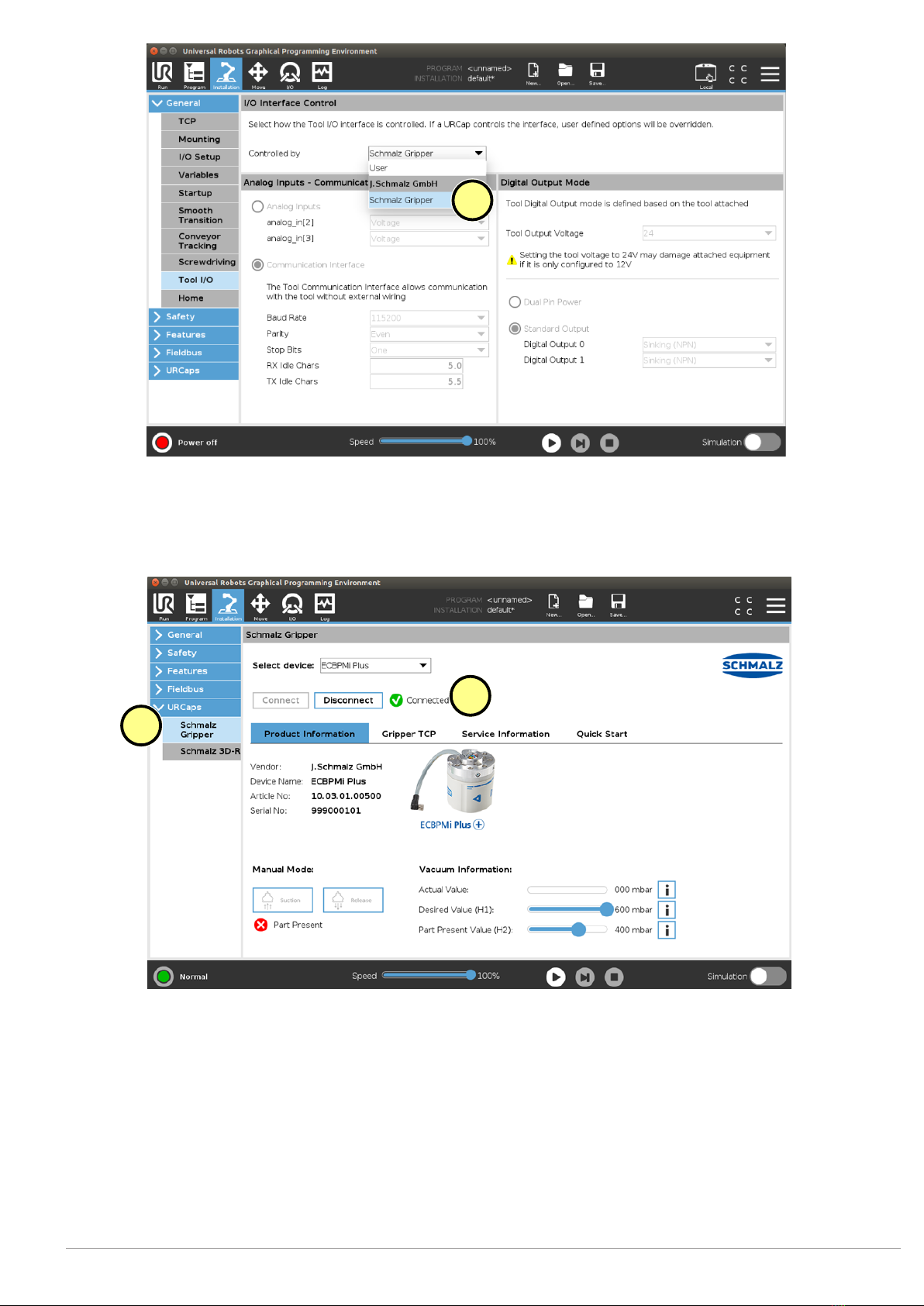
(2) Drücken Sie auf den Menüreiter "Installation > URCaps > Schmalz Gripper" und wählen Sie im
DropDown-Menü das Gerät “ RECB” aus.
2
1
(3a) UR E-Serie: Wählen Sie die Gerätekonfiguration "Schmalz-Gripper" unter
"Installation > General > Tool I/O >
I/O Interface Control" im Dropdown-Menü aus.
8 / 27 DE · 30.30.01.02635 · 00 · 12/20
3a
• Versorgen Sie den Greifer mit Druckluft, 6 bar (87psi) (siehe Montage)
(4a) Verbinden Sie sich mit dem Gerät unter Menüreiter „Installation > URCaps > SchmalzGripper“ mit dem Button
„Connect“ (Verbindungszeit ca. 2s)
4a
4b
(4b) Den Verbindungsstatus sehen Sie am nebenstehenden Icon
Parametrieren Sie die TCP-Konfiguration wie gewohnt unter „Installation > General > TCP“
Alternativ (5) geben Sie den "Tool Center Point (TCP)", den "Center of Gravity (COG)" und das Gewicht des
Greifers wie folgt ein:
(5a) Unter „Installation > URCaps > Schmalz Gripper" auf den Tab “Gripper TCP”.
(5b) Wählen Sie die Checkbox „Change robot TCP configuration“ aus.
DE · 30.30.01.02635 · 00 · 12/20 9 / 27

5a
5b
5c
Geben Sie folgende Punkte wie folgt ein:
Gripper mass: 0,6kg
TCP: Center of Grafity:
X = 0mm RX = 0 rad CX = 0 mm
Y = 0mm RY = 0 rad CY = 0 mm
Z = Messen Sie die Länge vom UR-Tool-Koordinatenursprung zu
ihrem Sauger-Greifpunkt (siehe Grafik: Abstand Z) (5c)
RZ = 0 rad CZ = Z/2 mm
(5d) Wählen Sie im DropDown-Menü “Schmalz_TCP“ aus über "Installation > General > TCP".
5d
(5e) Legen Sie die Konfiguration als Standard über das ICON fest
10 / 27 DE · 30.30.01.02635 · 00 · 12/20
Otros manuales para RECB
2
Este manual sirve para los siguientes modelos
2
Tabla de contenidos
Idiomas:
Otros manuales de Aspiradora de Schmalz
























